 |
|||||||||
| Home | Pblog | Earlier QTVR of Scenes | |||||||
開催日:平成20年8月29日(金)〜30日(土)
場所:まちづくり会館3階 エキシビション・スペース
1階展示テーマ:映像で見る神戸のまちと建築
QTVRの制作へのいざない
QTVR : QuickTime VR : QuickTime Virtual Reality
はじめに
(1) QTVRの画像をを制作する動機
建築物、まちの場、都市空間の要素空間などのQTVRの画像を鑑賞して、感動した。
感動したから制作する。
都市、まち、建築、構築物を空間として記録し、未来への啓示に寄与できると考えている。
QTVRの画像を通じて、まちづくりや観光に資することなどから、人々の交流がひろがるであろうと思っている。
(2) QTVRでできること
1) まちや都市を空間として、記録することができる。
2) デジタルデータとして記録した都市の局部空間は、系統立てて、全世界の人々にみせることができる。
3) 撮影された対象空間の中の時系列変化を考察することができる。また、定点定時刻的な記録として残れば、都市空間の時系列変化を比較できる。
4) 一旦、QTVRのデータが出来上がれば、空間デザインのシュミレーションに利用できる。
(3) 私が撮影・制作してきた作品の編集においての感想と考察
- 展示の過程での考察
-
1) 神戸市の都市空間が展開する景観は、地形の標高位差がもたらすものが基盤となっている。神戸市全体の眺望であれ、部分の場における都市要素の構築物群の景観のいずれにおいても、平坦な地域地区における景観と異なった様相を表す。
2) 神戸市の沿岸地帯は、瀬戸内海の海面・港湾と六甲山系の傾斜面の間にある。
港からの景観は、山脈の緑地を背景に、水平に市街地が連続する様態がみれる。船舶やランドマークとなる建造物が広い範囲の中で明瞭に捉えることができる。
山麓や山頂からは、広大な眺望を満喫できる場所が多く、その中で、建造物は市街地の画面的広がりの中で実物として把握できる。
3) 町並みや場の景観では、明治期以降の近代期の建造物、構築物、などによる遺産が優れて顕われている。
1. QTVRの制作方法
QTVRの制作は、大別すると、「カメラ」(撮影のための三脚などのアクセサリーを含む)と、「パーソナルコンピュータ(QTVRを作成するアプリケーションを含む)」を用いて実行します。
(1) QTVRの種類
通常のカメラによる静止画は、撮影対象を切り取って撮影している。
QTVRは、ある撮影場所において、水平方向、垂直方向に360°を見渡すことができるように撮影します。その後で、3次元(3D)のデータをもつ画像ファイルを、PC( : personal computer )のディスプレイにおいて、鑑賞したり、景観や環境を分析したりします。
QTVRには大きく分けて、二つの種類がある。
1) CYLINDRICAL PANORAMAS
パノラマ写真と思ってもらえばよい。
実際は、下図のように、シリンダーの中心点にカメラをおき、水平に360°回転して撮影した画像である。
鑑賞するときは、広幅員の景観や風景を、PC ( : personal computer )のディスプレイ上で、任意のサイズを指定して鑑賞する。
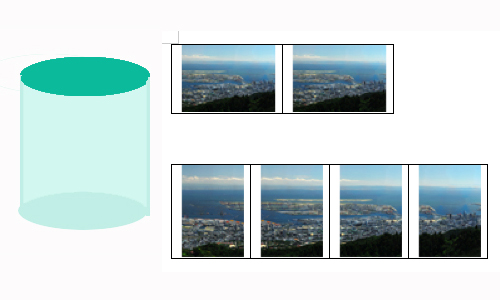
撮影時のカメラを横位置に置くか、縦位置に置くかによって、垂直方向の撮影範囲は変わります。
2) SPHERICAL (CUBIC) PANORAMAS

ディスプレーの額縁の範囲で見えている画像は、マウスで操作すると、水平、垂直方向に360°回転して、画像を追跡することができる。

注:上段の8mm魚眼レンズでの撮影は理論的には前後2枚で良いのですが、レンズ周辺の光量が不足するので、3枚ないし4枚撮影する方が良い。
注:現在は10.5mm魚眼レンズでは、下段のマルチロウ撮影は仰角90゜で1枚、仰角45゜で4枚、水平8枚、俯角45゜で4枚、俯角90゜で1枚、三脚消去用で2枚の計20枚撮影している。(種々の組み合わせの撮影が可能である)
参考 ; QTVRについて説明のWebサイトのページ
http://www.apple.com/jp/quicktime/technologies/qtvr/
アップル社によるQuickTime VRの説明
http://www.apple.com/quicktime/gallery/cubicvr/index.html
アップル社による作品例
(2) QTVRにおいて撮影している空間感覚と、実際の実現へ
水平パノラマ( 1) CYLINDRICAL PANORAMAS )は下図のように撮影者がシリンダーの中心に入って、対象を捉えています。このように撮影者がカメラをもって順次撮影していくと、一応素材となる写真枚数が撮影できますが、水平パノラマとしてつなぎ合わせをしようとするとうまくつながらないことが、よく生じます。
黒色は人間の身体、グレイは頭、水色はカメラ。 赤色線は対象を撮影する枚数と方向。
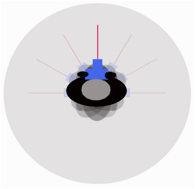
確実に、迅速に、全空間を撮影する方法を以下に、説明していきます。
2. QTVRのための写真撮影
カメラ、レンズ、付帯する機材(三脚、レベラー、ローター、雲台、シャッターレリーズなど)を用いて、撮影をします。
(1) カメラについて
1) マニュアル撮影ができるカメラを用意する。
フォーカス、露出(シャッター速度、絞り値)のいずれもマニュアル設定ができるカメラを用いる。私の場合は、これまで撮影した大部分は、“Nikon D70“のマニュアル操作で撮影してきた。自動フォーカスは、焦点を合わせる対象にずれが生じて、焦点距離が変わるなどが生じて、撮影した写真がつながらなくなる。
2) 魚眼レンズと広角レンズ
魚眼レンズは、円周魚眼レンズと、長辺魚眼レンズ、対角線魚眼レンズがある。いずれも使用しますがが、長所と短所がある。
広角レンズを用いて撮影すると、魚眼レンズの場合よりも、撮影枚数が非常に増える。しかし、画像の解像度は高くなる。
対象空間とその中の建造物などの要素を、記録していくときは、広角レンズの方が適当である。
3) 今回展示した摩耶山掬星台パノラマ写真 (印刷)
中望遠の長焦点レンズ(135mm)を用いた。撮影した写真枚数は、“168枚”であり、これをつなぎあわせてある(ステッチするという)。
(2) レンズについて
1) 魚眼レンズか、広角レンズか
撮影にあたって、使用するレンズの焦点距離と、カメラの撮像素子のサイズの組み合わせによって、撮影枚数は、変わる。
一つは、レンズの焦点距離であり、これは画角が違うからである。
魚眼レンズ : 焦点距離 8mm,10.5mm, 16mmなどで、大体180°の画角
広角レンズ : 焦点距離 10mm〜35mmで、対角画角が120°〜 63°位
このほかに、標準レンズ、望遠レンズがある。
二つめは、デジタルカメラの撮像素子には、APS-Cフォーマット(サイズ 24mm×16mm)と、35mm版フォーマット(サイズ 36mm×24mm)がある。レンズの表記の焦点距離は、35mm版フォ―マットの焦点距離で表されている。
簡易撮影の場合は、魚眼レンズ 8mmでは、3〜4枚で撮影する。
詳細撮影の場合は、マルチロウ撮影となり、20〜30枚に増える。

2) ニコンか、シグマか
ニコンのカメラボディの場合は、APS-Cフォーマット(Nikon D40,D60,D70,D80,等)では、「Nikon AF DX
Fisheye-Nikkor ED 10.5mm F2.8G」が、画質、レンズ重量、素直な画像といった点で使い心地がよい。
35mm版フォーマット(Nikonでは、FXフォーマットと名付けている)では、AF Fisheye-Nikkor 16mm F2.8を使うことになる。
カメラメーカーによっては、魚眼レンズが用意されていないことがある。そのときは、レンズメーカー“シグマ”の適合マウントの“8mm”を使用すればよい。
写真のレタッチを行なうアプリケーションは、Nikon
Capture NX2は、ニコンのレンズとの相性はなかなか快適である。
(3) 付帯する機材の設定
撮影現場では、三脚を据えて、その上にレベラー、ローター、雲台をのせ、そしてカメラを据え付けます。レベラー、レーザーレベラー、カメラにつける水準器などで水平を整えます。三角定規や雲台を操作して、カメラとレンズの軸線とノーダルポイントを設定します。
カメラなどの機材を列記すると、つぎの通りである。メーカーと製品名は、私が使用している機材であり、他のメーカーで適合するものを使って撮影できる。
1)三脚;Manfrotto
・ 軽くて頑丈な三脚が良い。
・ カメラの回転による重心移動で、三脚がしなるようなものは駄目です。
2)レベラー;Manfrotto レベリングベース
・ 有る方が良い、なしですませて、ステッチをする時に、水平を修正すれば良いのですが、時間が掛かり過ぎます。
・ もし水平がキッチリとれていないQTVRを見ると、船酔いをし見る人の気分を損なうでしょう
3)ローター;Manfrotto 300N
・ 必ず必要とは言えませんが、ステッチ作業が容易になるように用いたほうがベターです。
・ カメラを一定角度に回転させる自信が有れば必要ないでしょう。
・ もし、用いるなら、一定角度で回転させたとき、クリック感が肌で解るものが有れば、夜の撮影は楽になります.
4)雲台; Manfrotto 303SPH
・ 魚眼レンズで垂直方向180度の画角がとれる場合、すなわち水平回転のみの撮影で事足りる場合は、フラットバーで代用できます。
・ そうでない場合は、カメラを上下にも回転させて、水平にも回転させる必要が有るので(マルチロウ撮影)、市販のパノラマ用の雲台が必要です。
・ ご自分で、工作するのも良いでしょう。
5)カメラ ; Nikon D70または、D200
6)シャッター・レリース
7)補助機材
・ レーザーレベラー、 三角定規、水準器
カメラ、レンズ、雲台などのバリエーションを例示します。このように制作者自身で撮影機材は工夫すればよい。
最も簡単なアルミ・フラット・バーの場合:
水平パノラマなら十分である。(仰角(上方向の角度)・俯角(下方向の角度)が180°の画角のレンズなら水平パノラマでなくキュービックパノラマのQTVRがつくれる)

「Nikon AF DX Fisheye-Nikkor ED 10.5mm F2.8G」で、画角が少し狭くなったときは、カメラを縦使いする。


カメラのフラッシュやライトをつけるためのアングルを利用している。

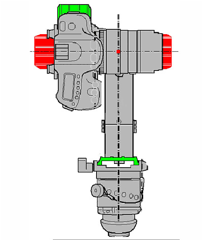
NikonD200,D70+Nikon10.5(マルチロウ撮影をおこなうとQTVRができます。しかしこの装置のままカメラを上下に回すとノーダルポイントがズレます。)

この写真のように、XYZ軸の3方向軸において、ノーダルポイントを固定する。
(4) 目的と状況に対応した撮影について
1)三脚撮影
・これが一番オーソドックスな撮影方法です
2)
一脚撮影
3)
高所ポール撮影
4)
水平ポール撮影
5)手持ち撮影
6)卓上撮影
7)底面追加撮影
8)バルーン撮影
9)模型飛行機撮影
(5) 焦点距離と撮影枚数
1) 焦点距離と画角
・重ねシロを20〜30%程度確保すること
2)画角と撮影枚数
3)マルチロウ撮影
4)
計算機
ここにアクセスしてみてください
http://www.frankvanderpol.nl/fov_pan_calc.htm
5)
天・地撮影の追加
(6) 露出:「絞り値とシャッタースピード」、フォーカス、ISO感度値、
ホワイトバランス
1) 適正露出のうち絞り値
2) 適正露出のうちシャッタースピード
3) フォーカス(焦点を合わせたい対象物までの距離合わせ)
魚眼レンズや超広角レンズの場合は被写界深度を利用すると、適切な結果が得られる。魚眼レンズや超広角レンズでは焦点合わせの距離を1m程度にしておくと、0.5m〜∞まで撮影像のピントが合っている。
レンズの焦点距離が35mm以上になると、マニュアルで焦点合わせを行なう。
4) ISO感度値、 ホワイトバランス
全て、マニュアル化すること、マニュアル化した手順によって撮影すると大失敗がすくなくなる。
HDR(ハイダイナミックレンジ)も良い。
(7) ステッチのためのアプリケーション
(8) 底面処理
・
水平パノラマの場合は必要なし。
・
photoshopで切り貼りを行なう。
・ photoshopのレイヤーマスクの利用する。
・
雲台の縦軸回転
・
手持ち地撮影
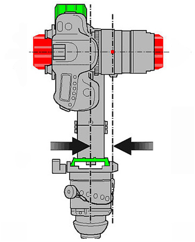
(9) ノーダル・ポイント
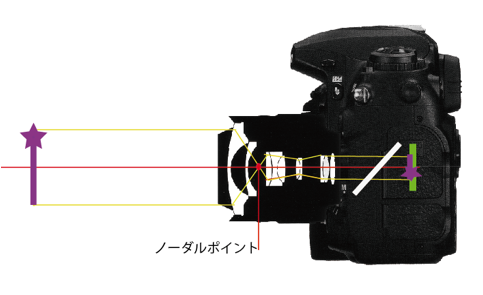
ノーダル・ポイントは、上図の赤点をいう。
カメラのレンズが、あらゆる方向に置いて、ノーダル・ポイントの位置を基準点にして撮影しているときは、撮影した結果の写真が一枚につながる。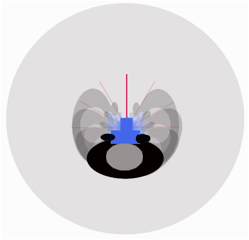
ノーダル・ポイントを撮影の基準点にすることは、述べてきた。QTVRの画像、水平パノラマのQTVRの画像の製作において、原理であり、最も重要な項目の一つである。
ノーダル・ポイントの原理としての図は既に出した。補足説明をする。
・ なぜ大切か、というのは、カメラで撮影するときフーカス(ピント)が合って、露出とシャッターが適度であれば、画像はとれるものです。しかし、その映像は、絵画やポートレートの様に同一平面にある画像ではなく、カメラに近い画像も有れば、離れている画像も有ります。カメラはそれら全てを同一平面上に撮影してしまいます。これが問題になる原因です。
・ 画像を1枚だけ撮影して、上下をカットしてパノラマ風にするのであればそれでいいのですが、水平2枚以上を撮影してステッチする場合は、カメラが光学的にどのようにして、映像を映し込んでいるのか知っていれば、2枚以上でも難なく繋がります。
・ それは、カメラの光軸上で画像が縮小回転している位置を中心にカメラを水平に回転させて撮影すると、また上下回転させて撮影すると、撮影された画像の特性は変化しないのです。
・ この特性を持つレンズ内の位置をノーダルポイントと言います。
Webの中で「ノーダルポイント」をキーワードとして探してみてください。3つほどの「ノーダルポイント」を探し出す方法が見つかると思います。
1)鉛筆もしくは乾電池の利用
鉛筆や乾電池をポールと見立てて、手前に配置した物と遠くに配置した物をカメラのファインダを通して見ます。撮影して拡大表示すれば良く解ります。調べるためには、これらポールが重なった方向をカメラの真正面の画像として撮影し、その後45゜〜60゜程度カメラを水平回移転(回転軸がノーダルポイントと一致する様にカメラを設定するのですが)させ撮影します。この2つ目の画像で、ポールのズレが発生していれば、ノーダルポイントはずれています。カメラを少し前後に移動させて、また2枚撮影し、前にずらすと、ずれが少なくなるのか、多くなるのか、調べます。その後再度カメラを前にずらすのか、後ろにずらすのかを繰り返し、2枚目の画像が1枚目の画像と同じような状態になるようにします。
2)金網の利用
金網を2から3m離れたところから、正面方向をカメラの真正面の画像として撮影し、その後45゜〜60゜程度カメラを水平回移転(回転軸がノーダルポイントと一致する様にカメラを設定するのですが)させ撮影します。やはりズレを(1)のように調べるのですが、金網を近景とし、金網よりできる限り後ろの背景を遠景とし、ずれを調べます。カメラの回転軸を基点に前後させてしらべます。金網を用いるとマルチロウ撮影時の上下回転軸も同時に調べられます。
3)パイプの利用
これも、ずれを調べるのですが、(1)(2)と少し異なり、バイプの前と後ろの円形のズレを調べます。調整はやはりカメラを前後させます。
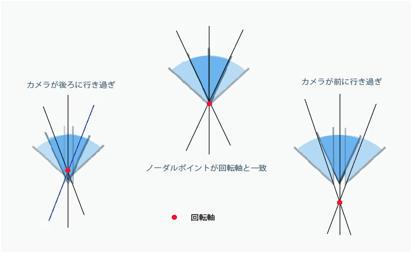
ノーダル・ポイントが解った上で、実際にカメラと雲台の設定を説明します。
雲台の垂直軸線、雲台の水平軸線に、レンズの中心軸線とノーダル・ポインを固定します。
それは、以下の図のようにすることである。(原画はManfrotto社カタログより、一部編集し直している.)
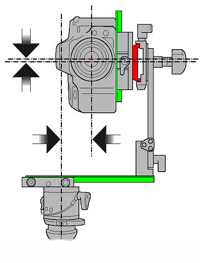
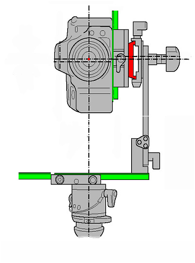
カメラの回転軸をノーダルポイントの位置にあうようにする。
前後の位置関係を調整する。
前後も、回転軸をノーダルポイントに合う様に前後を調整して図のようにします。
このようにノーダル・ポイントを、固定できれば、マルチロウ撮影は、このマニュアルに沿って、円滑に撮影ができる。
--------------------------------------------------------------------------------------------------Back